

LLM-enhanced Scene Graph Learning for Household Rearrangement
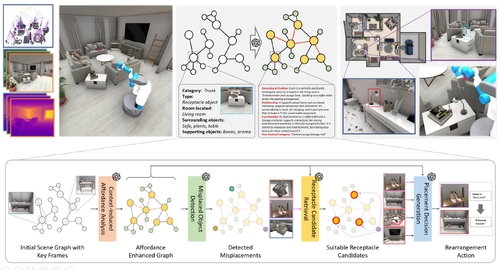
DescriptionThe household rearrangement task involves spotting misplaced objects in a scene and accommodate them with proper places. It depends both on common-sense knowledge on the objective side and human user preference on the subjective side. In achieving such task, we propose to mine object functionality with user preference alignment directly from the scene itself, without relying on human intervention. To do so, we work with scene graph representation and propose LLM-enhanced scene graph learning which transforms the input scene graph into an affordance-enhanced graph (AEG) with information-enhanced nodes and newly discovered edges (relations). In AEG, the nodes corresponding to the receptacle objects are augmented with context-induced affordance which encodes what kind of carriable objects can be placed on it. New edges are discovered with newly discovered non-local relations. With AEG, we perform task planning for scene rearrangement by detecting misplaced carriables and determining a proper placement for each of them. We test our method by implementing a tiding robot in simulator and perform evaluation on a new benchmark we build. Extensive evaluations demonstrate that our method achieves state-of-the-art performance on misplacement detection and the following rearrangement planning.
Authors

Event Type
Technical Papers
TimeTuesday, 3 December 20249:00am - 12:00pm JST

LocationHall C, C Block, Level 4



