

PVP-Recon: Progressive View Planning via Warping Consistency for Sparse-View Surface Reconstruction
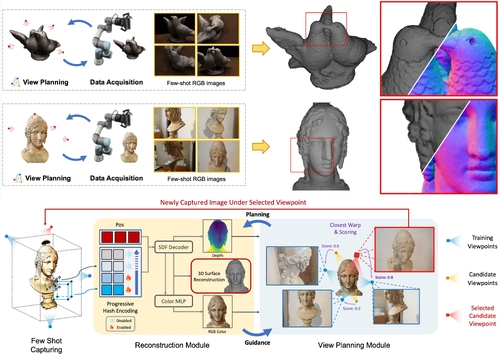
DescriptionNeural implicit representations have revolutionized dense multi-view surface reconstruction, yet their performance significantly diminishes with sparse input views. A few pioneering works have sought to tackle the challenge of sparse-view reconstruction by leveraging additional geometric priors or multi-scene generalizability. However, they are still hindered by the imperfect choice of input views, using images under empirically determined viewpoints to provide considerable overlap. We propose PVP-Recon, a novel and effective sparse-view surface reconstruction method that progressively plans the next best views to form an optimal set of sparse viewpoints for image capturing. PVP-Recon starts initial surface reconstruction with as few as 3 views and progressively adds new views which are determined based on a novel warping score that reflects the information gain of each newly added view. This progressive view planning progress is interleaved with a neural SDF-based reconstruction module that utilizes multi-resolution hash features, enhanced by a progressive training scheme and a directional Hessian loss. Quantitative and qualitative experiments on three benchmark datasets show that our framework achieves high-quality reconstruction with a constrained input budget and outperforms existing baselines.
Authors

Event Type
Technical Papers
TimeWednesday, 4 December 202411:19am - 11:31am JST

LocationHall B5 (1), B Block, Level 5


