

mpcMech: Multi-Point Conjugation Mechanisms
SessionComputational Design
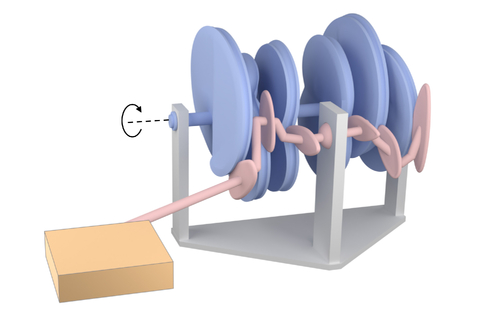
DescriptionA mechanism is an assembly of moving parts interconnected by joints to transfer an input motion to a desired output motion. Traditionally, to generate a complex motion, mechanisms are modeled by selecting and combining a number of mechanical parts with simple shapes such as links, gears, and cams. Combining multiple mechanical parts results in a mechanism with an intricate topology, which not only complicates assembly and maintenance but also deteriorates the functionality of generating motions due to accumulation of manufacturing imprecisions. To get rid of these limitations, we study mechanisms with a single pair of moving parts for generating complex motions. We model the pair of moving parts as a pair of conjugate surfaces with multiple conjugation points, forming a multi-point conjugation mechanism.
To study this new mechanism, we establish a connection between conjugate surface pairs and form-closure grasps to formulate a dynamic form closure condition under which one conjugate surface is able to continuously transfer the motion to the other conjugate surface by utilizing multiple conjugation points. Guided by the condition, we propose an optimization-based approach to model the geometry of a multi-point conjugation mechanism for exactly generating a user-specified motion, in 1-, 2-, or 3-DOF motion space. The core of our approach is to model multiple conjugate curve pairs that satisfy various requirements in multi-point conjugation, dynamic form closure, and surface fabricability. We demonstrate the effectiveness of our approach by modeling different classes of multi-point conjugation mechanisms to generate various motions, evaluating the mechanisms’ kinematic performance with 3D printed prototypes, and presenting three applications of these mechanisms.
To study this new mechanism, we establish a connection between conjugate surface pairs and form-closure grasps to formulate a dynamic form closure condition under which one conjugate surface is able to continuously transfer the motion to the other conjugate surface by utilizing multiple conjugation points. Guided by the condition, we propose an optimization-based approach to model the geometry of a multi-point conjugation mechanism for exactly generating a user-specified motion, in 1-, 2-, or 3-DOF motion space. The core of our approach is to model multiple conjugate curve pairs that satisfy various requirements in multi-point conjugation, dynamic form closure, and surface fabricability. We demonstrate the effectiveness of our approach by modeling different classes of multi-point conjugation mechanisms to generate various motions, evaluating the mechanisms’ kinematic performance with 3D printed prototypes, and presenting three applications of these mechanisms.
Event Type
Technical Papers
TimeWednesday, 4 December 20245:16pm - 5:28pm JST

LocationHall B5 (1), B Block, Level 5



