

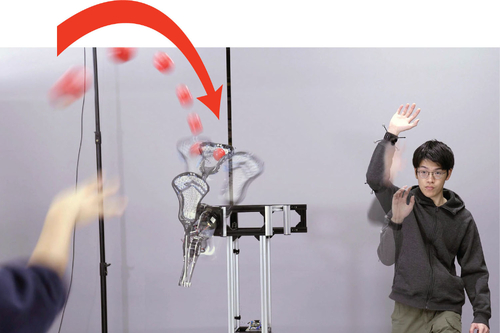
AgiLimb: Embodied Agile Robotic Arm by Integrating Digital Reflex and Seamless Action Takeover
SessionEmerging Technologies
DescriptionWe developed the AgiLimb system to enable robot operators to transcend their own perceptual and physical abilities while maintaining a sense of agency. We propose an idea of combining automated action takeover mechanism and vision-based digital reflex. The system achieved dynamic catch and throw conforming to the operator's intention.


Event Type
Emerging Technologies
TimeThursday, 5 December 202410:00am - 5:00pm JST

LocationHall E, E Block, Level B2



TE
EH
