


A Demonstration of Selfrionette: A Force-Input Controller for Continuous Full-Body Avatar Manipulation and Enhanced Virtual Haptics
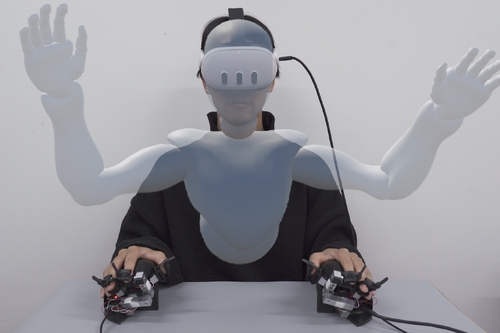
DescriptionThis paper proposes a handheld controller that utilizes user's fingers' force-inputs into an embodied and continuous virtual self body motion in virtual reality (VR). The proposed system not only has a potential to overcome users' physical and spatial constraints of a physical environment but enables virtual haptic interactions.


Event Type
Emerging Technologies
TimeWednesday, 4 December 202412:40pm - 12:50pm JST

LocationHall E - Talk Stage, E Block, Level B2






