Interactive Relative Pose Estimation for 360° Indoor Panoramas through Wall-Wall Matching Selections
SessionPosters Gallery
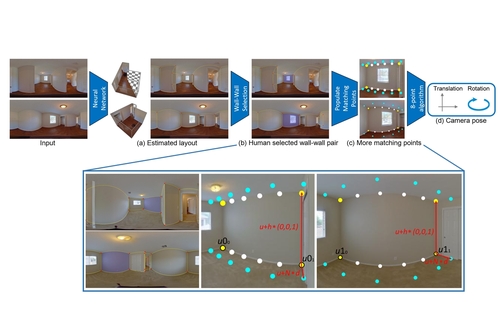
DescriptionAn open-source panoramic relative camera pose estimation method that works well for difficult wide-baseline problems by taking a hybrid approach that leverages neural network estimations and key user inputs.


Event Type
Poster
TimeFriday, 15 December 202310:00am - 4:00pm
LocationExhibition Hall 1, Level 2 (Exhibition Centre)

