Differentiable Dynamic Visible-Light Tomography
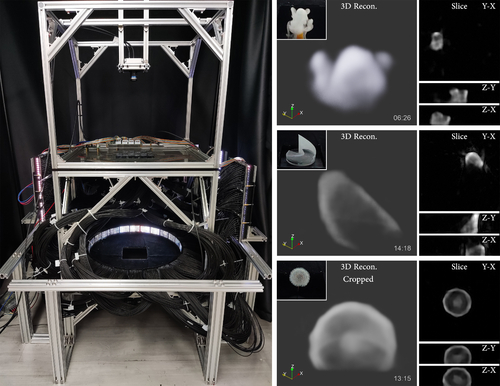
DescriptionWe propose the first visible-light tomography system for real-time acquisition and reconstruction of general temporally-varying 3D phenomena. Using a single high-speed camera, a high-performance LED array and optical fibers with a total length of 5km, we build a novel acquisition setup with no mechanical movements to simultaneously sample using 1,920 interleaved sources and detectors with a complete 360-degree coverage. Next, we introduce a novel differentiable framework to map both tomography acquisition and reconstruction to a carefully designed autoencoder. This allows the joint and automatic optimization of both processes in an end-to-end fashion, essentially learning to physically compress and computationally decompress the target information. Our framework can adapt to various factors, and trade between capture speed and reconstruction quality. We achieve an acquisition speed of up to 36.8 volumes per second at a spatial resolution of 32x128x128; each volume is captured with as few as 8 images. The effectiveness of the system is demonstrated on acquiring various dynamic scenes. Our results are also validated with the reconstructions computed from the measurements with one source on at a time, and compare favorably with state-of-the-art techniques.
Authors

Event Type
Technical Papers
TimeTuesday, 12 December 20239:30am - 12:45pm
LocationDarling Harbour Theatre, Level 2 (Convention Centre)

